3. Immersions and embeddings; examples
3.1 DEFINITION Let and be differentiable manifolds. A differentiable mapping is said to be an immersion if is injective for all . If, in addition, is a homeomorphism onto , where has the subspace topology induced from , we say that is an embedding. If and the inclusion is an embedding, we say that is a submanifold of .
It can be seen that if is an immersion, then ; the difference is called the codimension of the immersion .
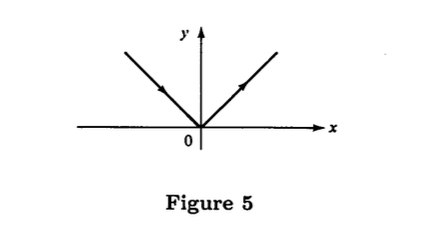
3.2 EXAMPLE The curve given by is not differentiable at (Fig. 5).
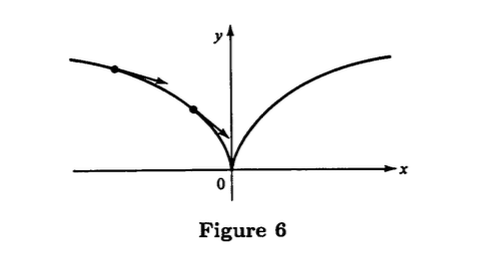
3.3 EXAMPLE The curve given by is a differentiable mapping but is not an immersion. Indeed, the condition for the map to be an immersion in this case is equivalent to the fact that , which does not occur for (Fig. 6).
3.4 EXAMPLE The curve (Fig. 7) is an immersion which has a self-intersection for . Therefore, is not an embedding.

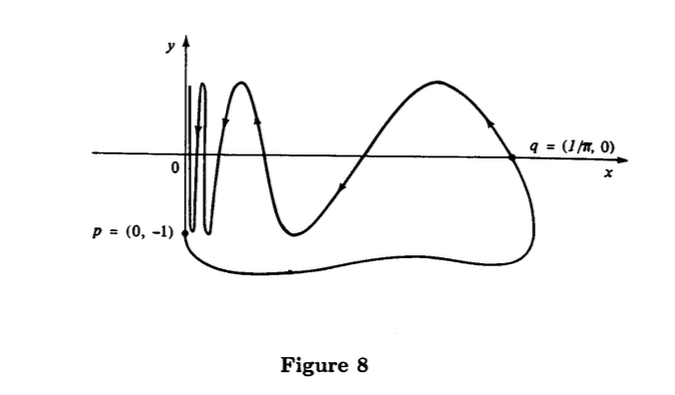
3.5 EXAMPLE The curve (Fig. 8)
is an immersion without self-intersections. Nevertheless, is not an embedding. Indeed, a neighborhood of a point , in the vertical part of the curve (Fig. 8) consists of an infinite number of connected components in the topology induced from . On the other hand, a neighborhood of such a point in the topology “induced” from (that is the topology of the line) is an open interval, hence a connected set.
3.6 EXAMPLE. It is clear that a regular surface has a differentiable structure given by its parametrizations . With
such a structure, the mappings are differentiable and, indeed, are embeddings of into ; that is an immediate consequence of conditions (a) and (b) of the definition of regular surface given in the introduction. We are going to show that the inclusion is an embedding, that is, is a submanifold of .
In fact, is differentiable, because for all there exists a parametrization of at and a parametrization of at ( is a neighborhood of in and is the identity mapping), such that is differentiable. In addition, from condition (b), is an immersion and, from condition (a), is a homeomorphism onto its image, which proves the claim.
For most local questions of geometry, it is the same to work with either immersions or embeddings. This comes from the following proposition which shows that every immersion is locally (in a certain sense) an embedding.
3.7 PROPOSITION Let , , be an immersion of the differentiable manifold into the differentiable manifold . For every point , there exists a neighborhood of such that the restriction is an embedding.
Proof. This fact is a consequence of the inverse function theorem. Let and be a system
of coordinates at and at , respectively, and let us denote by the coordinates of and by the coordinates of . In these coordinates, the expression for , that is, the mapping , can be written
Let . Since is an immersion, we can suppose, renumbering the coordinates for both and , if necessary, that
To apply the inverse function theorem, we introduce the mapping given by
where . It is easy to verify that restricted to coincides with and that
It follows from the inverse function theorem, that there exist neighborhoods of and of such that the restriction is a diffeomorphism onto . Let . Since and is a diffeomorphism, for , we conclude that the restriction to of the mapping is a diffeomorphism, hence an embedding.